
智能客服
常见问题
公众号
二维码
二维码

所有文档
轨迹纠偏类接口为开发者提供 轨迹去噪、抽稀、绑路 功能,包括实时位置纠偏、轨迹纠偏、里程计算功能。
| 模块 | 接口名称 | 功能说明 |
|---|---|---|
| track | getlatestpoint | 查询某 entity 的实时位置,支持纠偏 |
| getdistance | 查询某 entity 一段时间内的轨迹里程,支持纠偏 | |
| gettrack | 查询某 entity 一段时间内的轨迹点,支持纠偏 |
目前中国主要有以下三种坐标系:
WGS84:为一种大地坐标系,也是目前广泛使用的GPS全球卫星定位系统使用的坐标系
GCJ02:是由中国国家测绘局制订的地理信息系统的坐标系统。由WGS84坐标系经加密后的坐标系
BD09:为百度坐标系,在GCJ02坐标系基础上再次加密。其中bd09ll表示百度经纬度坐标,bd09mc表示百度墨卡托米制坐标
非中国地区地图,统一使用WGS84坐标
简介:查找entity最近一个轨迹点,支持实时纠偏。
支持功能:返回entity最新的实时位置(支持纠偏)、速度、方向、高度、定位精度、定位模式、交通方式等信息。
适用场景:适用于持续追踪某一终端,实时展示最新的纠偏后轨迹点。
https://yingyan.baidu.com/api/v3/track/getlatestpoint
//GET请求
| 参数名称 | 字段含义 | 数据类型 | 是否必填 | 备注 |
|---|---|---|---|---|
| ak | 用户的AK | string | 是 | |
| service_id | service的ID,service 的唯一标识 | int | 是 | 在轨迹管理台创建鹰眼服务时,系统返回的 service_id |
| entity_name | entity唯一标识 | string(0-128) | 是 | |
| process_option | 纠偏选项 | string(0-128) | 否 | 默认值为: |
| coord_type_output | 返回的坐标类型 | string | 否 | 默认值:bd09ll |
| sn | 用户的权限签名,若用户所用AK的校验方式为SN校验时该参数必须。SN计算方法 | string | 否 |
返回值
| 参数名 | 字段含义 | 类型 | 备注 | ||
|---|---|---|---|---|---|
| status | 状态码 | int | 返回状态,0为成功 | ||
| message | 响应信息 | string | 对status的中文描述 | ||
| latest_point | 实时位置信息 | string | |||
| longitude | 经度 | double | |||
| latitude | 纬度 | double | |||
| loc_time | 定位时间 | UNIX时间戳 | |||
| radius | 定位精度 | double | |||
| coord_type | 坐标类型 | string | 该字段仅在海外区域时返回,返回值为:wgs84。当坐标位于国内(含港、澳、台)时,返回坐标类型与请求参数 coord_type_output 所设一致,因此不再返回该字段。 | ||
| direction | 方向 | int | 范围为[0,359],0度为正北方向,顺时针 | ||
| height | 高度 | double | 只在GPS定位结果时才返回,单位米 | ||
| speed | 速度 | double | 单位:千米/小时 | ||
| floor | 楼层 | string | |||
| locate_mode | 轨迹对应的定位方式(鹰眼分析得出) | string | 仅当请求参数is_processed=1时返回。 可能的返回值:未知;GPS/北斗定位;网络定位;基站定位 | ||
| transport_mode | 轨迹对应的交通方式(鹰眼分析得出) | string | 仅当请求参数is_processed=1,且process_option中transport_mode=auto时返回。 可能的返回值:未知;驾车;骑行;步行;停留。注意:该功能为高级付费服务,您可通过 申请试用或购买使用该功能 | ||
| object_name | 对象数据名称 | string | 若无值,则不返回该字段 | ||
| column_key | 开发者为 track自定义的字段 | string | |||
https://yingyan.baidu.com/api/v3/track/getlatestpoint?service_id=1000&entity_name=小明&coord_type_output=bd09ll&process_option=denoise_grade=1,radius_threshold=20,need_mapmatch=1,transport_mode=driving&extensions=road_info&ak=你的'''AK'''
{"status": 0,"message": "成功","latest_point": {"longitude": 116.43683174878,"latitude": 40.079614535339,"loc_time": 1521120545,"direction": 81,"height": 21,"radius": 7,"speed": 7.142739,"locate_mode": "GPS/北斗定位","transport_mode": "驾车"}}
简介:查询entity 一段时间内行驶里程。
支持功能:1. 支持计算一段时间内轨迹纠偏、补偿后的总里程,也支持计算原始轨迹里程;2.支持对中断的轨迹区间进行里程补偿,支持使用直线或驾车/骑行/步行路线规划的里程进行补偿。
适用场景:1. 通用型的原始和纠偏后轨迹里程计算;2. 应用于网约车、物流等行业的用车实时计费,通过纠偏和补偿后的里程,校准用车计费。
https://yingyan.baidu.com/api/v3/track/getdistance
//GET 请求
| 参数名称 | 字段含义 | 数据类型 | 是否必填 | 备注 |
|---|---|---|---|---|
| ak | 用户的AK,授权使用 | string | 是 | |
| service_id | service的ID,service 的唯一标识 | int | 是 | service 的唯一标识。在轨迹管理台创建鹰眼服务时,系统返回的 service_id |
| entity_name | entity唯一标识 | string | 是 | |
| start_time | 起始时间(起始的loc_time) | UNIX时间戳 | 是 | |
| end_time | 结束时间(结束的loc_time) | UNIX时间戳 | 是 | 结束时间不超过当前时间,不能早于起始时间,且与起始时间差在24小时之内。为提升响应速度,同时避免轨迹点过多造成请求超时(3s)失败,建议缩短每次请求的时间区间,将一天轨迹拆分成多段进行拼接 |
| is_processed | 是否返回纠偏后里程 | string | 否 | 默认值:0 |
| process_option | 纠偏选项 | string(0-128) | 否 | 默认值为: |
| supplement_mode | 里程补偿方式 | string(0-128) | 否 | 默认值:no_supplement,不补充 |
| low_speed_threshold | 低速阈值 | double | 否 | 单位:千米/小时 |
| sn | 用户的权限签名,若用户所用AK的校验方式为SN校验时该参数必须。SN计算方法 | string | 否 |
| 参数名 | 字段含义 | 类型 | 备注 |
|---|---|---|---|
| status | 状态码 | int | 返回状态,0为成功 |
| message | 响应信息 | string | 对status的中文描述 |
| distance | 轨迹里程 | double | 单位:米 |
| low_speed_distance | 低速里程 | double | 单位:米 若请求参数中填写了low_speed_threshold,则返回该字段,否则不返回 代表速度低于low_speed_threshold的里程 |
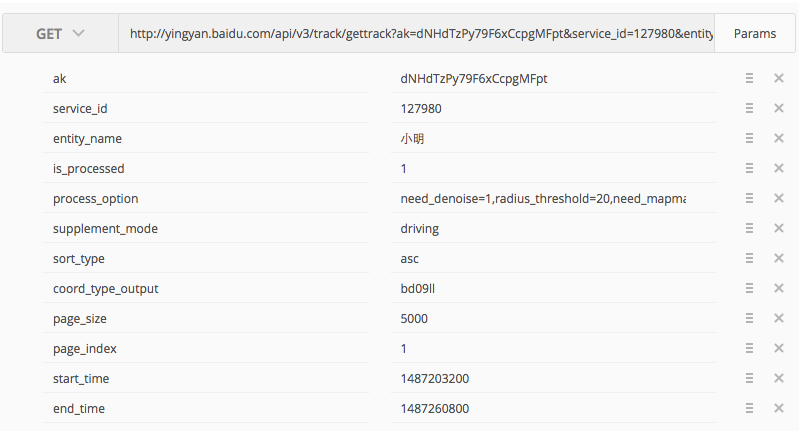
https://yingyan.baidu.com/api/v3/track/getdistance?ak=<用户的AK>&service_id=<用户的SERVICE_ID>&entity_name=小明&is_processed=1&process_option=denoise=1,radius_threshold=20,need_mapmatch=1,transport_mode=driving&supplement_mode=driving&low_speed_threshold=20&start_time=1487203200&end_time=1487260800
{"status": 0,"message": "成功","distance":"3634.7","low_speed_distance":"349.3"}
简介:查询一个时间段内一个entity的连续轨迹信息,并进行纠偏。
支持功能:支持对一段轨迹进行纠偏、绑路、补偿中断区间道路、分析起终点、计算总里程和收费里程。其中每一个轨迹点的信息包括:坐标、速度、方向、高度、定位精度、定位模式、交通方式等。
适用场景:适用于查询一段时间的轨迹并进行纠偏,解决轨迹缺失与漂移问题,这也是开发者最常使用、最依赖鹰眼的一个场景。
https://yingyan.baidu.com/api/v3/track/gettrack
//GET 请求
| 参数名称 | 字段含义 | 数据类型 | 是否必填 | 备注 |
|---|---|---|---|---|
| ak | 用户的AK,授权使用 | string | 是 | |
| service_id | service的ID,service 的唯一标识 | int | 是 | service 的唯一标识。在轨迹管理台 |
| entity_name | entity唯一标识 | string | 是 | |
| start_time | 起始时间(起始的loc_time) | UNIX时间戳 | 是 | |
| end_time | 结束时间(结束的loc_time) | UNIX时间戳 | 是 | 结束时间不超过当前时间,不能早于起始时间,且与起始时间差在24小时之内。为提升响应速度,同时避免轨迹点过多造成请求超时(3s)失败,建议缩短每次请求的时间区间,将一天轨迹拆分成多段进行拼接 |
| is_processed | 是否返回纠偏后里程 | int | 否 | 默认值:0 |
| process_option | 纠偏选项 | string(0-128) | 否 | 仅在is_processed=1时生效。默认值为: |
| supplement_mode | 轨迹补偿交通方式选择 | string(0-128) | 否 | 默认值:no_supplement |
| supplement_content | 轨迹补偿内容 | string(0-128) | 否 | 仅在supplement_mode不为no_supplement时生效。 |
| low_speed_threshold | 低速阈值 | double | 否 | 单位:千米/小时 |
| coord_type_output | 返回的坐标类型 | string | 否 | 默认值:bd09ll |
| sort_type | 返回轨迹点的排序规则 | string | 否 | 默认值:asc |
| page_index | 分页索引 | int(1到2^21-1) | 否 | 默认值:1 |
| page_size | 分页大小 | int(1-5000) | 否 | 默认值:100 |
| sn | 用户的权限签名,若用户所用AK的校验方式为SN校验时该参数必须。SN计算方法 | string | 否 |
| 参数名 | 字段含义 | 类型 | 备注 | ||
|---|---|---|---|---|---|
| status | 状态码 | int | 返回状态,0为成功 | ||
| message | 响应信息 | string | 对status的中文描述 | ||
| total | 忽略掉page_index,page_size后的轨迹点数量 | int | 代表一共有多少条符合条件的轨迹点 | ||
| size | 返回的结果条数 | int | 代表本页返回了多少条符合条件的轨迹点数量 | ||
| distance | 此段轨迹的里程数 | double | 单位:米 符合条件的所有轨迹点的总里程 注意:是total个轨迹点的里程,和分页及本页显示的size无关 | ||
| toll_distance | 此段轨迹的收费里程数 | double | 单位:米 收费道路包括高速等收费路段 | ||
| low_speed_distance | 低速里程 | double | 单位:米 若请求参数中填写了low_speed_threshold,则返回该字段,否则不返回 代表速度低于low_speed_threshold的轨迹里程 | ||
| start_point | 起点信息 | ||||
| longitude | 经度 | double | |||
| latitude | 纬度 | double | |||
| coord_type | 坐标类型 | string | 该字段仅在海外区域时返回,返回值为:wgs84。当坐标位于国内(含港、澳、台)时,返回坐标类型与请求参数 coord_type_output 所设一致,因此不再返回该字段 | ||
| loc_time | 定位时间 | UNIX时间戳 | 轨迹点定位时间 | ||
| end_point | 终点信息 | ||||
| longitude | 经度 | double | |||
| latitude | 纬度 | double | |||
| coord_type | 坐标类型 | string | 该字段仅在海外区域时返回,返回值为:wgs84。当坐标位于国内(含港、澳、台)时,返回坐标类型与请求参数 coord_type_output 所设一致,因此不再返回该字段 | ||
| loc_time | 定位时间 | UNIX时间戳 | 轨迹点定位时间 | ||
| points | 历史轨迹点列表 | ||||
| longitude | 经度 | double | |||
| latitude | 纬度 | double | |||
| loc_time | 定位时间 | UNIX时间戳 | 轨迹点定位时间 | ||
| create_time | 创建时间 | 格式化时间 | 该时间为服务端时间 | ||
| direction | 方向 | int | 范围为[0,359],0度为正北方向,顺时针 | ||
| height | 高度 | double | 只在GPS定位结果时才返回,单位米 | ||
| speed | 速度 | double | 单位:千米/小时 | ||
| radius | 定位精度 | double | 单位:米 | ||
| locate_mode | 轨迹对应的定位方式(鹰眼分析得出) | string | 仅当请求参数is_processed=1时返回。 可能的返回值:未知;GPS/北斗定位;网络定位;基站定位 | ||
| transport_mode | 轨迹对应的交通方式(鹰眼分析得出) | string | 仅当请求参数is_processed=1且process_option中transport_mode=auto时返回。 可能的返回值:未知;驾车;骑行;步行;停留注意:该功能为高级付费服务,需通过 反馈平台 联系工作人员开通 | ||
| floor | 楼层 | string | 仅在百度地图高精室内定位合作区域返回 | ||
| coord_type | 坐标类型 | string | 该字段仅在海外区域时返回,返回值为:wgs84。当坐标位于国内(含港、澳、台)时,返回坐标类型与请求参数 coord_type_output 所设一致,因此不再返回该字段 | ||
| _supplement | 是否为补充的点 | int | 若为原始轨迹点位置纠正后的点,则不返回该字段; 若该点为鹰眼纠偏绑路时自动补充的道路形状点,则_supplement=1; 若该点为通过supplement_mode和supplement_content在长距离中断区间使用路线规划补偿的轨迹点,则_supplement=2; | ||
| column-key | 自定义字段 | string | 当用户创建了track的自定义属性,且在创该属性赋有值,才会返回此字段 | ||
输入AK可生成包含IP/SN校验方式的代码
<?php// 此处填写你在控制台-应用管理-创建应用后获取的AK$ak = '您的AK';// 此处填写您在鹰眼轨迹管理平台创建的service_id// 发起一个http get请求,并返回请求的结果// $url字段为请求的地址// $param字段为请求的参数function request_get($url = '', $param = array()) {if (empty($url) || empty($param)) {return false;}$getUrl = $url . "?" . http_build_query($param);$curl = curl_init(); // 初始化curlcurl_setopt($curl, CURLOPT_URL, $getUrl); // 抓取指定网页curl_setopt($curl, CURLOPT_TIMEOUT, 1000); // 设置超时时间1秒curl_setopt($curl, CURLOPT_RETURNTRANSFER, 1); // curl不直接输出到屏幕curl_setopt($curl, CURLOPT_HEADER, 0); // 设置header$data = curl_exec($curl); // 运行curlif (!$data) {print("an error occured in function request_get(): " . curl_error($curl) . "\n");}curl_close($curl);return $data;}// 请求地址$url = 'https://yingyan.baidu.com/api/v3/track/gettrack';// 此处设置过滤条件$param['ak'] = $ak;$param['entity_name'] = 'entity_1';$param['start_time'] = '1687575378';$param['end_time'] = '1687579293';$res = request_get($url, $param);// 将原始返回的结果打印出来print("请求的原始返回结果为:\n");print($res . "\n");?>
注意:拷贝示例代码后,请在代码中填入您的serviceID再运行;
{"status": 0,"message": "成功","total": 10156,"size": 100,"distance": 70101.769271664,"toll_distance": 0,"start_point":{"longitude": 121.47756835641,"latitude": 31.228864478309,"loc_time": 1487210008},"end_point":{"longitude": 121.66034736775,"latitude": 31.145494901873,"loc_time": 1487260798},"points":[{"loc_time": 1487210008,"latitude": 31.228864478309,"longitude": 121.47756835641,"create_time": "2017-02-16 09:53:56","direction": 160,"height": 5,"key1": "value1","radius": 10,"speed": 6.8,"locate_mode": "GPS/北斗定位","transport_mode": "驾车"},{"loc_time": 1487210013,"latitude": 31.228900948179,"longitude": 121.47727614458,"create_time": "2017-02-16 09:53:56","direction": 0,"height": 36,"key1": "value1","radius": 10,"speed": 0,"locate_mode": "GPS/北斗定位","transport_mode": "停留"},...{"loc_time": 1487210503,"latitude": 31.232230380323,"longitude": 121.47848441484,"create_time": "2017-02-16 10:02:09","direction": 228,"height": 6,"key1": "value1","radius": 5,"speed": 1.87,"locate_mode": "GPS/北斗定位","transport_mode": "停留"}]}
上一篇
下一篇
本篇文章对您是否有帮助?